
产品详情
| 产品名称: | Festo 抓取系统平行抓手 三点抓手 摆动抓手 旋转抓手 |
|---|---|
| 产品品牌: | FESTO |
| 型号: | DHDS-16-A-NC 1259492 |
| 型号: | DHDS-16-A 1259491 |
| 型号: | DHRS-16-A 1310160 |
| 型号: | DHRS-25-A 1310162 |
| 型号: | DHWS-16-A 1310178 |
| 型号: | DHWS-25-A 1310180 |







产品描述
抓取系统
抓取系统是工件和搬运系统之间的连接机构,是工业机器人或搬运系统不可或缺的重要技术组件。抓手可采用气动或电驱操
作方式,用于抓取、夹持、定位和定向工件或刀具。抓取系统通常位于搬运系统最外面或最后一根轴上,与常规电源线相
连。
抓取系统的不同效用
抓取系统具有多种效用。它们通过机械、气动、电动或附着方式工作。
机械抓手类似人手,具有一根或多根手指。这种抓取系统可由多个刚性关节构成,一般柔软且灵活。其通常采用气动运行方
式,也就是通过压缩空气进行操作。但也支持机械和电气驱动方式。
气动抓手采用真空吸盘或吸杯,用于吸住工件进行运输和加工。此时要借助真空技术和压力原理夹紧和移动待加工工件。如
果由于表面不允许生成真空(比如多孔或穿孔结构等)等原因,导致无法使用气动抓手,通常使用附着性抓取系统作为替
代。
当具有微小茸毛的夹取表面压在工件上时,会产生范德华力,将工件立即提起。当附着性抓手受控向侧面轻翻时,附着力会
被释放。附着性抓手的优点是无需耗电,格外节能。
具有磁性功能的电动抓手吸住工件并进行夹持。磁性抓取系统分为两种:永磁抓手和电磁抓手。使用永磁抓手时,通过磁铁
将工件提起后,必须使用其他系统取下工件。电磁抓手通过电能进行接通和关闭,因此可以轻松抓取和放下工件。
Festo 机械抓手
Festo 机械抓手通过内置驱动器进行移动,通过传动装置将驱动运动转换成夹取运动。夹爪的这种运动称为行程。可修改行程
和夹持力以夹取和搬运不同规格的工件。Festo提供气动款和电动款长行程抓手。
平行抓手
Festo 提供不同规格的机械平行抓手。可用作内部抓手和外部抓手。平行标准抓手用于在干净环境中搬运各种小型工件。
Festo 提供配备载重型夹钳T形槽导轨、坚固耐用的抓取系统,可承受较强的力负载。全封闭抓手适合在重污染恶劣环境中执
行搬运作业。高精度平行抓手配备无间隙夹钳滚动轴承。
Festo 核心产品系列包括三款平行抓手:不同结构规格的 DHPC、DHPS、HGPL和HGPT。DHPC和DHPS夹持力大、体积小、重
复精度高,HGPL则尤其适合大型工件和长行程搬运。HGPT平行抓手坚固耐用、性能强劲,与HGPL一样配备T形槽导轨。除
了核心产品系列,Festo还提供了可满足不同要求的平行抓手:从极其适合抓取大型工件的产品,到自定心抓手和适合极恶劣
环境的抓手,再到体型超小巧、方便使用的微型抓手,不一而足。
平行抓手
三点抓手可以定心抓取工件。Festo提供多种规格的三点抓手。标准三点抓手适合干净环境中的通用搬运作业。如需承受较大
力负载,可以选择配备载重型T形槽导轨、坚固耐用的三指抓取系统进行内部和外部夹取。全封闭三点抓手适合在重污染恶
劣环境中执行搬运作业。
三点抓手
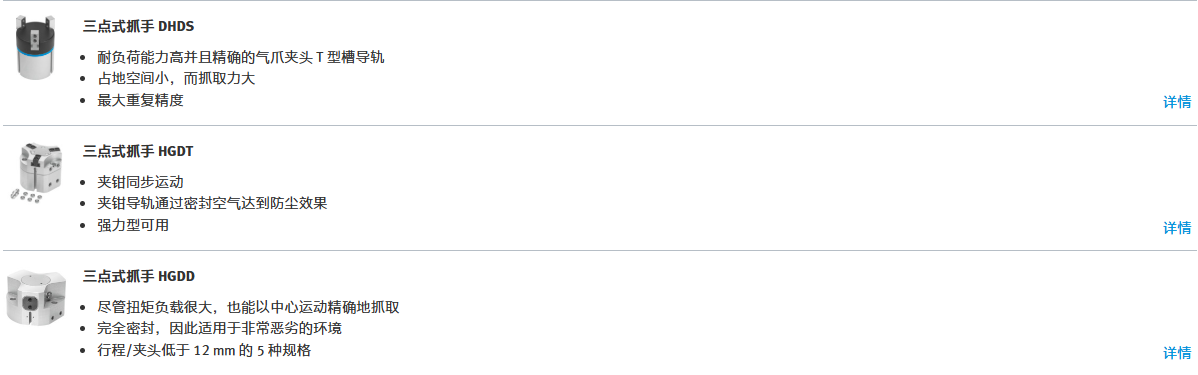
三点抓手 DHDS体积小、夹取力大、重复精度高。Festo的三点抓手HGDD可在高扭矩负载下,通过定心运动实现精准夹取,
尤其适合在恶劣环境中使用。三点抓手HGDT通过阻隔空气实现夹钳导轨防尘,抓手使用寿命格外长。这款产品可以用作强
力抓手,支持夹钳同步运动。
三点抓手
摆动抓手
Festo 摆动抓手标配提供小型件抓手和微型抓手两种款型。摆动抓手的夹钳每个最大可以打开 20°。夹钳可打开一定角度,从
而无需侧向接近物体。定义打开角度既可节省循环时间,又能避开障碍轮廓。
我们推出的最新型号-摆动抓手 DHWC既可用作双作用抓手,也可用作单作用抓手。此外,得益于夹钳的侧向支撑,这款抓手
可以承受较大扭矩。摆动抓手DHWS配备升级版夹钳导轨和内部固定节流装置,因此在80%应用场合中无需使用外部节流装
置。结构轻便小巧的Festo摆动抓手 HGWM。其配备可外部调整的抓手手指,实现多元化应用。
摆动抓手
旋转抓手
Festo 提供了两款旋转抓手。标准旋转抓手可用作小型工件抓手,在干净环境中执行作业。装备阻隔空气接口的坚固耐用款可
以承受较大力负载。旋转抓手的夹爪,每个最大可以打开 90°。夹钳可打开较大角度,从而无需侧向接近物体。
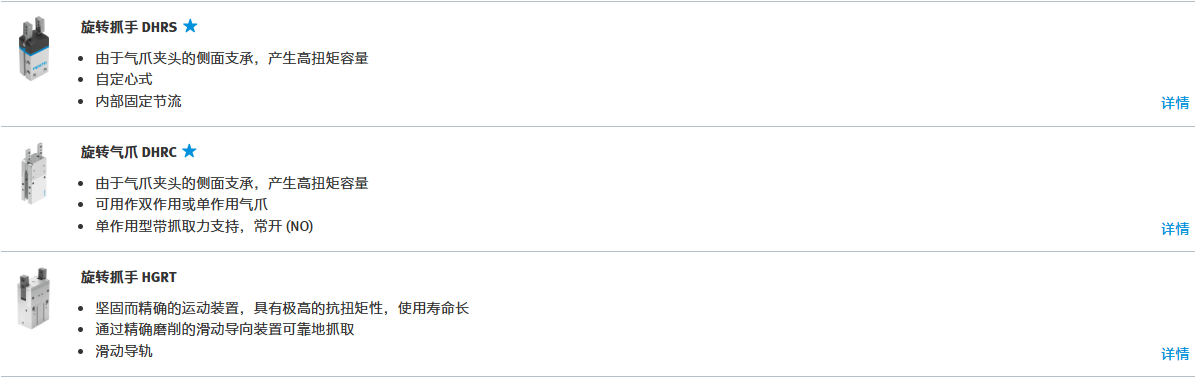
Festo 的旋转抓手DHRC和DHRS采用夹爪侧向支撑设计,可以承受较大扭矩。前者既可用作双作用抓手,也可用作单作用抓
手;后者更为坚固耐用,配备内部节流装置。旋转抓手HGRT的特色在于坚固耐用又精确的运动学设计,不但能承受超高扭
矩,而且使用寿命出众。
旋转抓手
摆动/抓手单元
由平行抓手和摆动装置构成的紧凑型功能组合-摆动/抓手单元,也是机械抓取系统系列的一部分。这两种功能可以相互独立
地单独进行控制和移动。摆动/抓手单元有三种结构规格可供选择。摆动角度可在0°至210°范围内进行设置,最大抓取力为
192 牛顿。
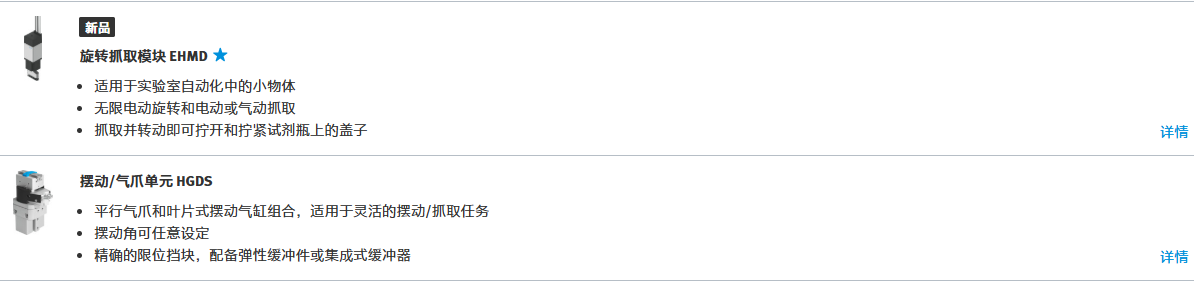
Festo 的摆动/抓取单元HGDS的摆动角度可以无级调整,通过弹性阻尼或集成式减振器实现精确的终端停止。
摆动/抓手单元
Festo 气动抓手
Festo 为气动抓取系统领域提供了气囊式气爪,该产品既安全又能保护部件,可用于内部抓手。其采用机械方式增大波纹管直
径,从而在内部轮廓夹紧载荷。气囊式气爪适合抓取和运输具有圆形开口的部件,比如玻璃杯、杯子、瓶子等。目前有两种
波纹管材料可以选择:EPDM适合较高负载,硅酮适合较高温度。
Festo 的气囊式气爪 DHEB提供了11种结构规格,抓取直径范围为8至85mm。DHEB的运动方向为向上或向下。如需抓取部
件的不同位置和形状以及具有不同几何形状的产品,适合使用形状自适应抓手 DHEF。
气囊式抓手
抓取系统的附件
Festo 为自己的抓取系统提供了多种配套附件,比如各种夹钳、行程缩减解决方案、抓手连接件、夹爪坯料和自适应抓手手指
等。
抓手附件



浏览: 【打印】



 发送邮件
发送邮件 微信
微信 QQ
QQ chuangqianzn@gmail.com
chuangqianzn@gmail.com 18156957462
18156957462